

扫一扫咨询详情

全国咨询热线:
19980777559
扫一扫咨询详情
全国咨询热线:
19980777559联系热线
调节阀是一个局部阻力可以改变的节流元件,阀芯在阀体内移动,改变阀芯与阀座之间的流通面积,从而达到调节被测介质的流量,控制工艺参数的目的。这些工艺参数包括压力、温度、液位及流量。
阀芯形式分直行程和角行程两类。直行程阀芯通过直线运动来改变与阀座之间的流通面积;角行程阀芯通过旋转运动来改变与阀座间的流通面积。

调节阀分类:
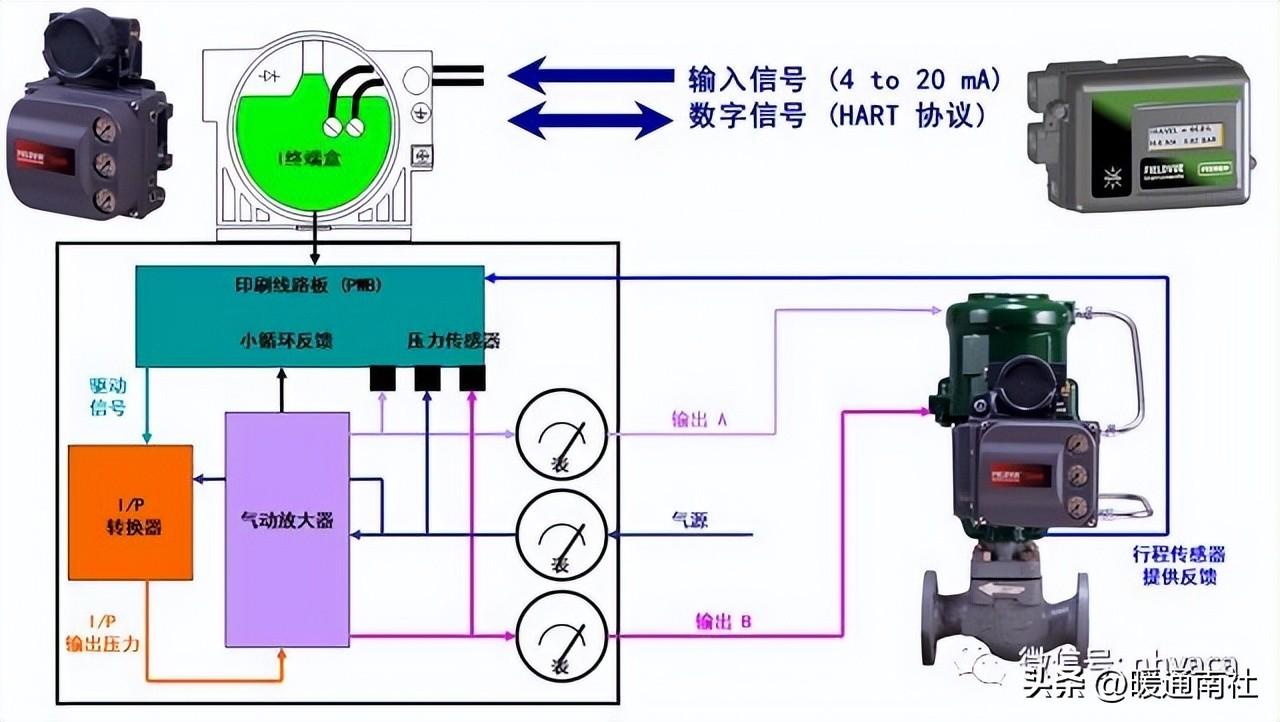
气动调节阀:气动调节阀就是以压缩空气为动力源,以气缸为执行器,并借助于电/气阀门定位器、转换器、电磁阀、保位阀等附件驱动阀门,(阀芯阀座相对移动)来实现开关量或比例式调节,接收控制信号:4-20mA电流信号并将电信号转变为压力信号(由定位器完成或电磁阀完成)来调节管道介质的流量、压力、温度等各种工艺参数。
气动调节阀优点:结构简单、动作可靠稳定、输出力大、安装维修方便、价格便宜且防火防爆。缺点:响应时间大、信号不适于远传。
气动薄膜式执行机构:

电动调节阀:电动执行机构接收4—20mA电流信号,通过电机的正反转驱使阀芯阀杆产生相对位移(直行程、角行程)来改变阀芯和阀座之间的截面积大小,控制管道介质的流量、温度、压力等工艺参数。
电动调节阀优点:动作快、适合远距离传送;节能(只在工作时才消耗电),环保(无碳排放),安装快捷方便(无需复杂的气动管路和气泵工作站)。缺点:结构复杂、推力小、价格贵,适用于防爆要求不太高及缺乏气源的场合。

气动调节阀分类:
1、按调节阀动作方式(阀芯运动轨迹)分类:
a.直行程调节阀;b.角行程调节阀。

2、按调节阀调节方式分类:
a.调节阀(调节切断阀)带定位器;
b.切断阀。
执行器组成:
执行器按其能源形式,分为气动、电动、液动三类。气动执行器由气动执行机构和调节机构(通常称调节阀)两部分组成。
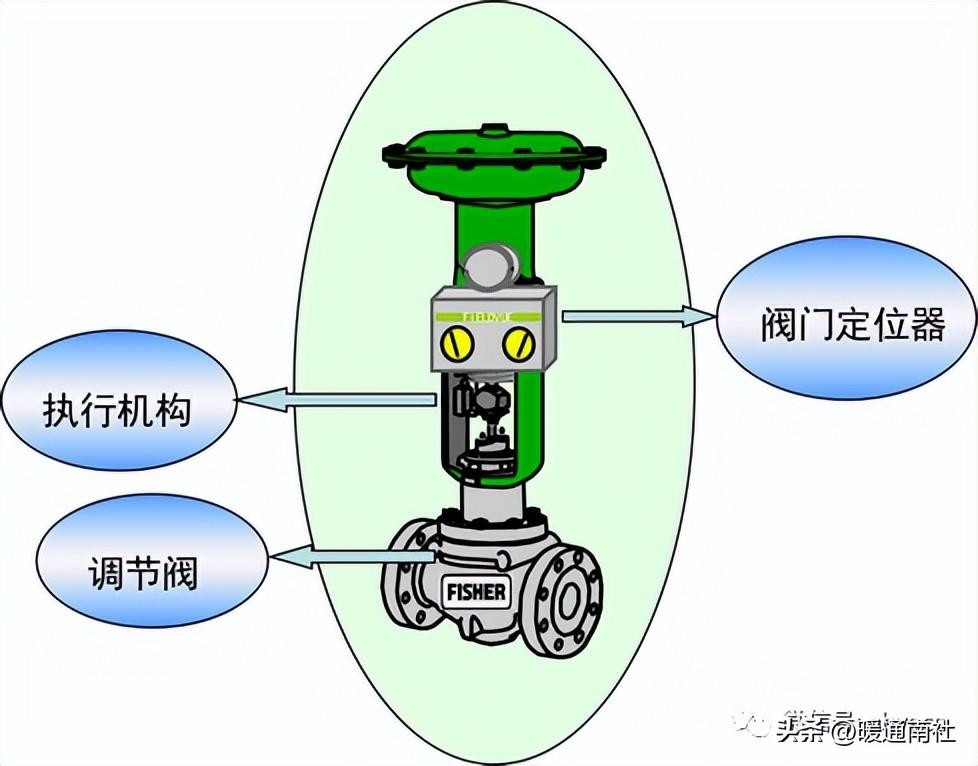
在某些特殊场合,还需要配置一些辅助装置如:阀门定位器和手轮机构。阀门定位器可提高调节质量,改善执行器的性能。手轮机构可以在调节系统因停电、停气、调节器无输出或执行机头薄膜损坏失灵时由人直接操作,保证生产的正常运行。
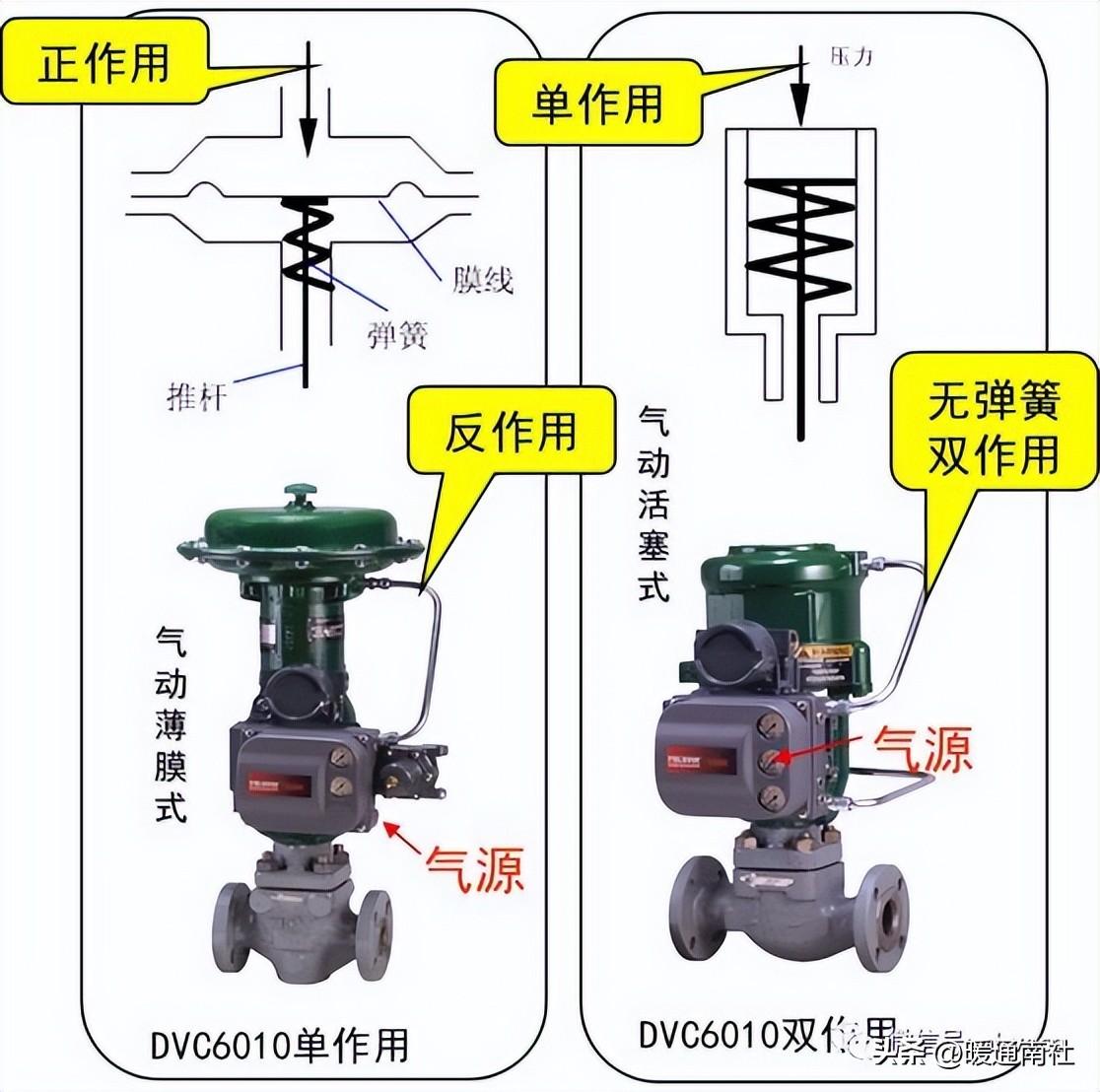
薄膜式执行机构的输出特性是成比例式的,即输出位移和输入气压信号成正比关系。当信号压力输入薄膜气室时,在薄膜上产生一个推力,使推杆移动并压缩弹簧,当弹簧的反作用力与信号在薄膜上产生的推力平衡时,推杆就稳定在一个平衡位置。信号压力越大,推杆位移量就越大,推杆的位移就是执行机构的直线位移,也称行程。
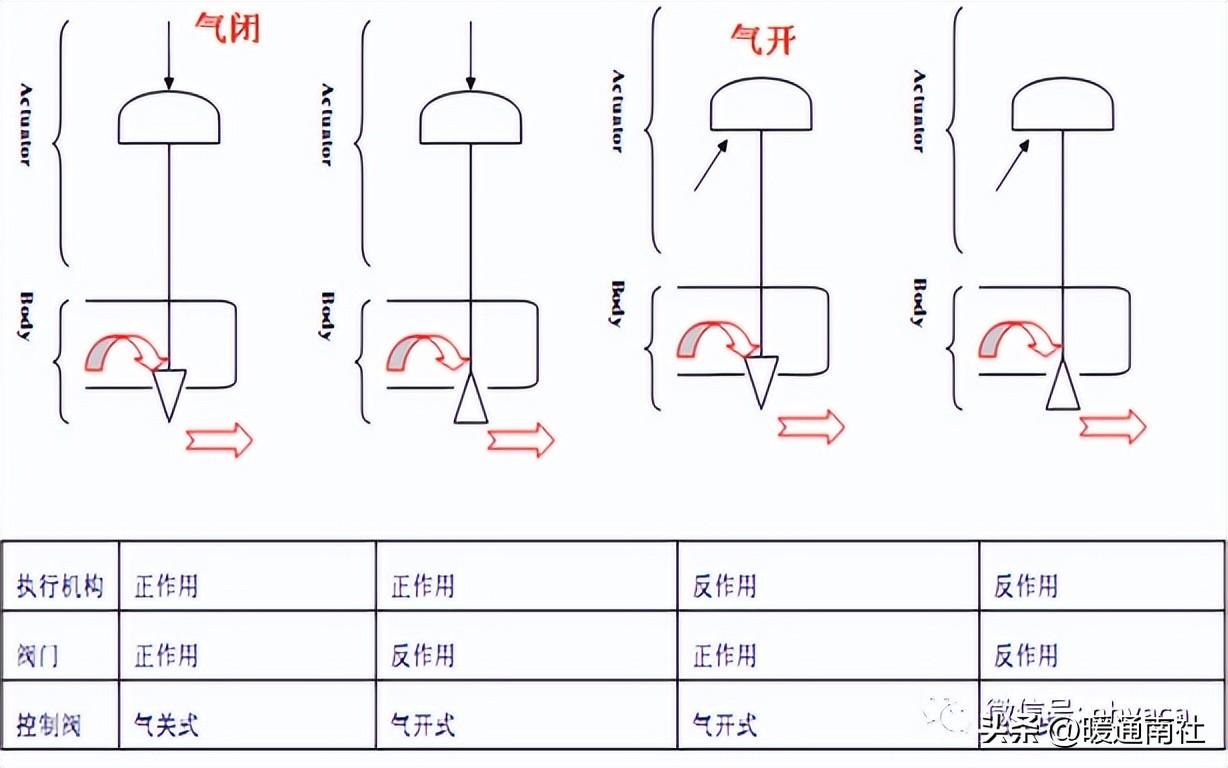
执行器的作用方式:
正作用执行机构是指信号压力增加时推杆向下移动;
反作用执行机构是指信号压力增加时推杆向上移动;
调节阀正装是指阀芯向下移动时,阀芯与阀座间的流通面积减小;
调节阀反装是指阀芯向下移动时,阀芯与阀座间的流通面积增大。
正作用执行机构和正装调节阀组成气关式执行器(正作用)。
反作用执行机构和正装调节阀组成气开式执行器(反作用)。
正作用执行机构和反装调节阀组成气开式执行器(反作用)。
正作用执行机构和正装调节阀组成气关式执行器(正作用)。

气开/气关作用方式的选择主要依据是保护人员及设备的安全。在正常生产流程中的调节阀一般选择气开,在故障时关闭,防止溢油;放空及排海等选择气关,在故障时开启泄压。
专业术语:
被控对象:需要实现控制的设备、机器或生产过程。
被控变量:对象内要求保持设定值(接近恒定值或按预定规律变化)的工艺参数。
操纵变量:受控制器调节,用以使被控变量保持设定值的物理量或能量。
干扰(扰动):除操纵变量外,作用于对象并能引起被控变量变化的因素。负荷变化就是一种典型的扰动。
设定值:被控变量的目标值(预定值)。
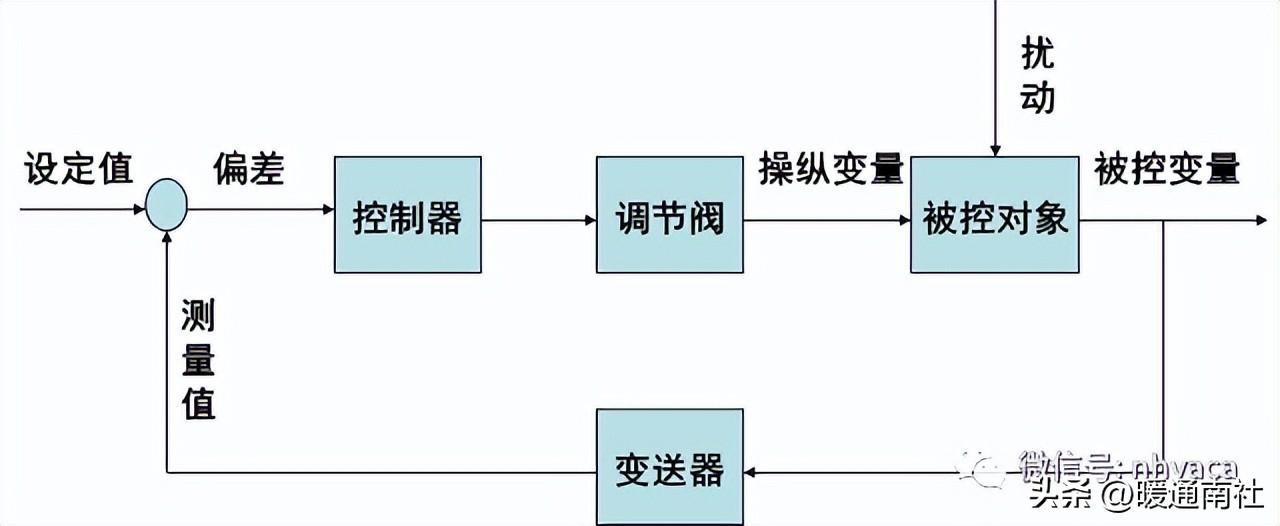
偏差:理论上应该是被控变量的设定值与实际值之差。但是能够直接获取的是被控变量的测量值信号而不是实际值,因此通常把设定值与测量值之差称作偏差。
闭环控制系统:
闭环控制系统的过渡过程及其品质指标:
过渡过程:一个控制系统在外界干扰或给定干扰作用下,从原有稳定状态过渡到新的稳定状态的整个过程,称为控制系统的过渡过程。它是衡量控制系统品质优劣的重要依据。
衡量控制系统好坏常采用以下几个指标:
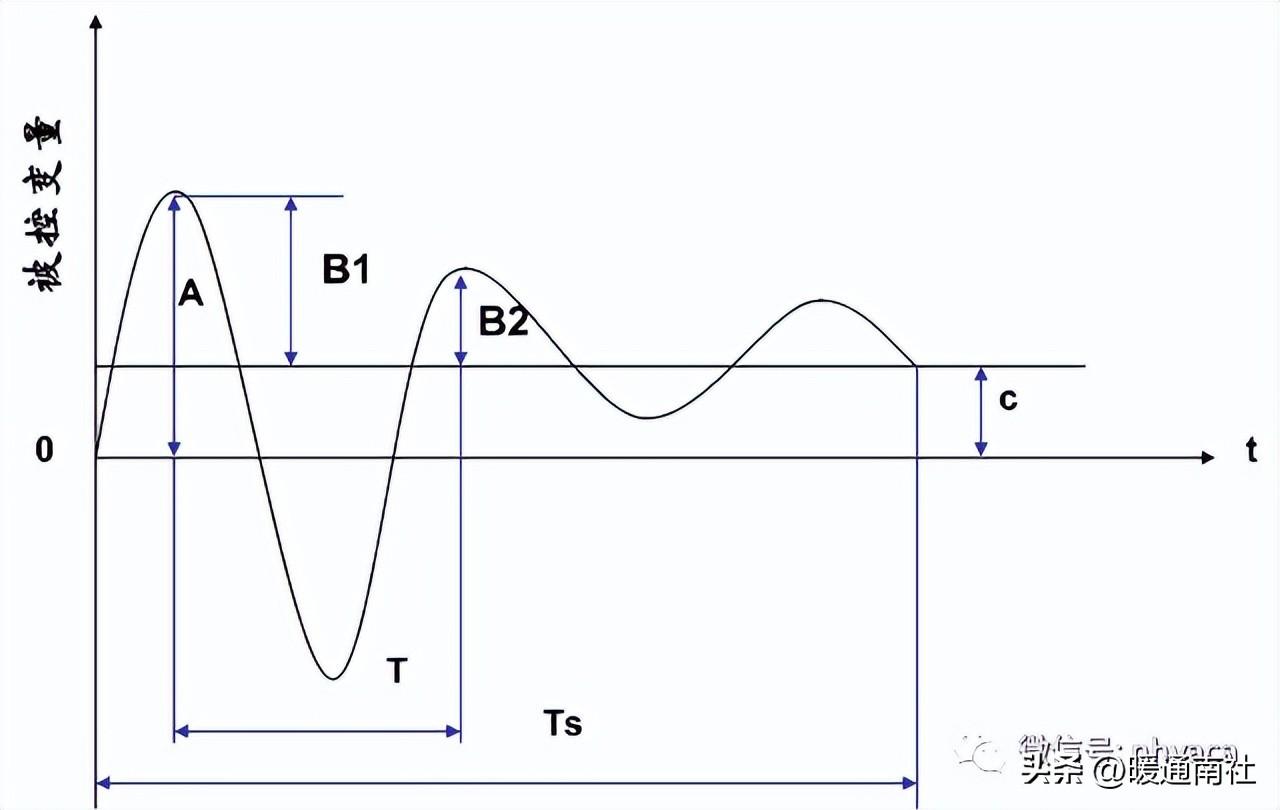
1.衰减比:它是表征系统受到干扰后,被控变量衰减程度的指标。其值为前后两个相邻峰值之必,即图中的B1/B2,一般希望它在4:1到5:1之间。
2.余差:它是指控制系统受到干扰后,过渡过程结束时被控变量的残余偏差,即图中的C。C值也就是被控变量在扰动后的稳态值与设定值之差。控制系统的余差要满足工艺要求,有的控制系统工艺上不允许有余差,即C=0。
3.最大偏差:它表示被控变量偏离给定值的最大程度。对于一个衰减的过渡过程,最大偏差就是第一个波的峰值,即图中的A值。A值就是被控变量所产生的最大动态偏差。
4.过渡过程时间:又称调节时间,它表示从干扰产生的时刻起,直至被控变量建立起新的平衡状态为止的这一段时间,图中以Ts表示。过渡过程时间越短越好。
5.振荡周期:被控变量相邻两个波峰之间的时间叫振荡周期,图中以T来表示。在衰减比相同的条件下,周期与过渡时间成正比。因此一般希望周期也是越短越好。
一个控制系统的过渡过程:
调节规律:调节器的输出信号随输入信号变化的规律。
比例 P 特点是动偏差小,有余差存在。值越大,余差越大,但系统越容易达到稳定。值越小,系统越容易振荡。
积分 I 特点是余差可被消除,但动偏差大,调节过程长。值越小,积分作用越明显,但过渡过程振荡剧烈,稳定程度下降。
微分 D 是根据偏差变化趋势而动作的,只要偏差一变化就提前采取动作,,因此叫超前作用。它只有在输入变化时,调节器才有输出,因此它不能作为一个独立的调节器使用。它主要使用在温度调节方面,利用温度微小的变化便进行相应调节,以应对温度调节的滞后性。值越大,超前时间越长。
比例作用可以加快控制过程,减少动偏差,缩短调节时间过程时间;积分作用可消除静偏差,克服余差;微分作用能抑制偏差的增长,减小动偏差。三作用调节规律只要适当的整定比例范围,积分和微分时间三个参数,可以得到较为满意的调节质量。但三作用调节器不是万能的,一些很简单的系统,例如用比例调节规律可以得到满意的调节质量的液位系统,用上三作用调节规律后,不仅系统复杂,投资增大,而且现场整定困难,整定不好反而容易使液位波动。因此,实际使用时,应按具体情况来选取仪表,切忌用三作用调节器代替一切!
气动调节阀分类:
气动执行机构按结构分类:
a.气动薄膜(单、多弹簧)执行机构:输出直线位移。
b.气动活塞(有、无弹簧)执行机构:输出直线位移或角位移。
薄膜执行机构的优缺点
优点:结构简单、可靠。
缺点:
①膜片承受的压力较低,最大膜室压力不能超过250KPa,加上弹簧要抵消绝大部分的压力,余下的输出力就很小了。
②为了提高输出力,通常作法就是增大尺寸,使得执行机构的尺寸和重量变得很大;另一方面,工厂的气源通常是500~700KPa,它只用到了250KPa,气压没充分利用,这是不可取的,活塞执行机构解决了此问题。
为了充分用足工厂的气源压力来提高执行机构的输出力、减少其重量和尺寸,便产生了活塞执行机构。
气动活塞(有、无弹簧)执行机构:输出直线位移或角位移
直行程活塞执行机构:
它主要用于配直行程的调节阀,它分为有弹簧式和无弹簧式两种
1、无弹簧活塞执行机构:
①用于故障下要求阀保位的场合;
②用于大口径阀要求执行机构推力特别大的场合;
2、有弹簧式活塞执行机构:
大多数场合使用有弹簧的活塞执行机构,其特点是:
①在故障情况下,通过弹簧进行复位,实现故障开或故障关功能;
②可以抵抗不平衡力的变化,增加执行机构的刚度,提高调节阀的稳定性。
它的缺点是:
①弹簧会抵消一部分输出力;
②气缸内设弹簧,增加了气缸的长度和重量。
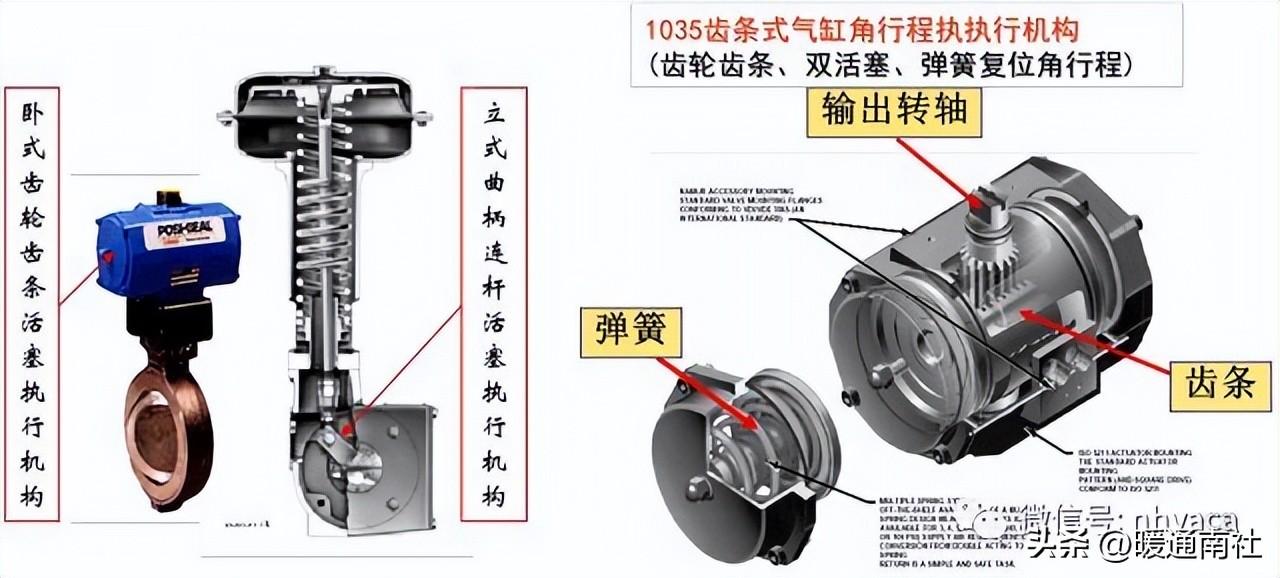
角行程活塞执行机构:
角行程的活塞执行机构主要用于角行程类的调节阀,按气缸的安装方向,分为立式气缸和卧式气缸两种。按活塞的推杆驱动输出轴转动的结构,常用的有:
①曲柄连杆式;
②齿轮齿条式;
③活塞螺旋式。
气动活塞式执行机构按其作用方式可分成比例式和两位式两种。所谓比例式是指输入信号压力与推杆的行程成比例关系,这时它必须与阀门定位器配用。两位式是根据输入执行机构活塞两侧的操作压力差来完成的。活塞由高压侧推向低压侧,就使推杆由一个极端位置推移至另一个极端位置。
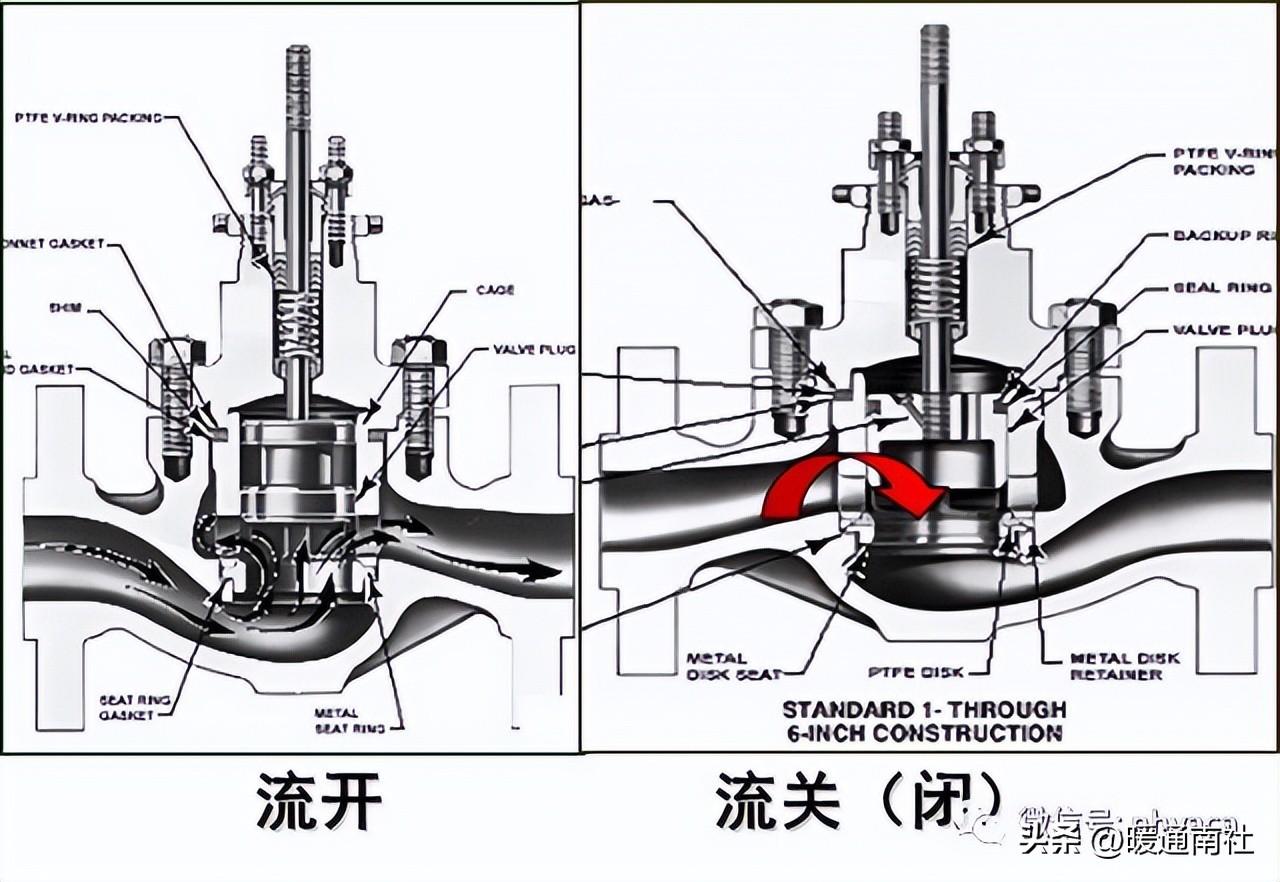
按流向不同分为:流开和流关(闭)。
流开:在阀芯节流处介质流动方向与阀门打开方向相同。
流关:在阀芯节流处介质流动方向与阀门关闭方向相同。
智能定位器工作原理:
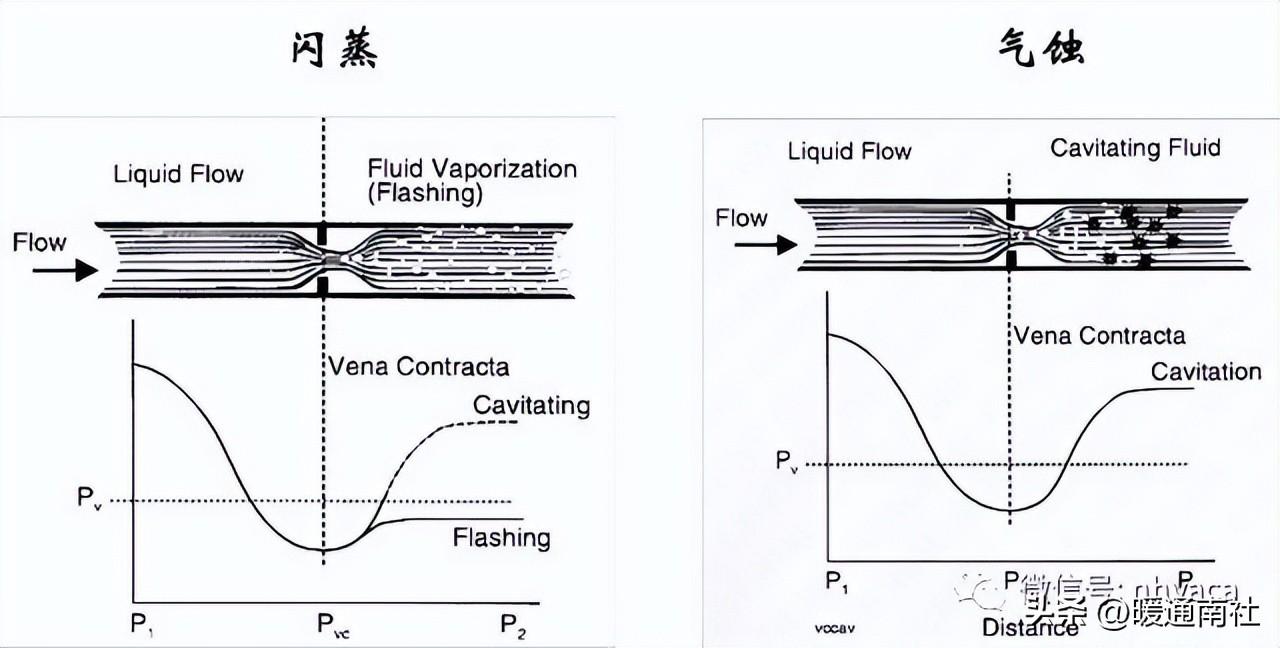
气蚀与闪蒸:
据伯奴利方程,管道内流体的流速提高压力就会下降。
管道节流处流体速度大幅度提高。压力急剧下降。
如果液体流经管道节流处的压力低于汽化压力(PV)将产生汽蚀或闪蒸现象。气蚀与闪蒸是由于管道节流引起的。
如果液体流过管道节流处,压力恢复后P2仍低于汽化压力(PV)(此时流体内仍有气泡)。
这种现象称为闪蒸。
如果液体流过管道节流处,压力恢复后P2高于汽化压力(PV)(此时流体内气泡破裂)。这种现象称为气蚀。
闪蒸最严重的破坏发生在流速最高处。即阀塞阀座处。冲蚀是闪蒸破坏的直观表现气蚀发生时,气泡破裂释放的能量使阀塞阀座甚至附近管道损坏,并伴发噪声气蚀与闪蒸是致使阀门损坏的重要原因!
本文来源于互联网,作者:刘海海。暖通南社整理编辑。

访问手机站
微信二维码
服务热线